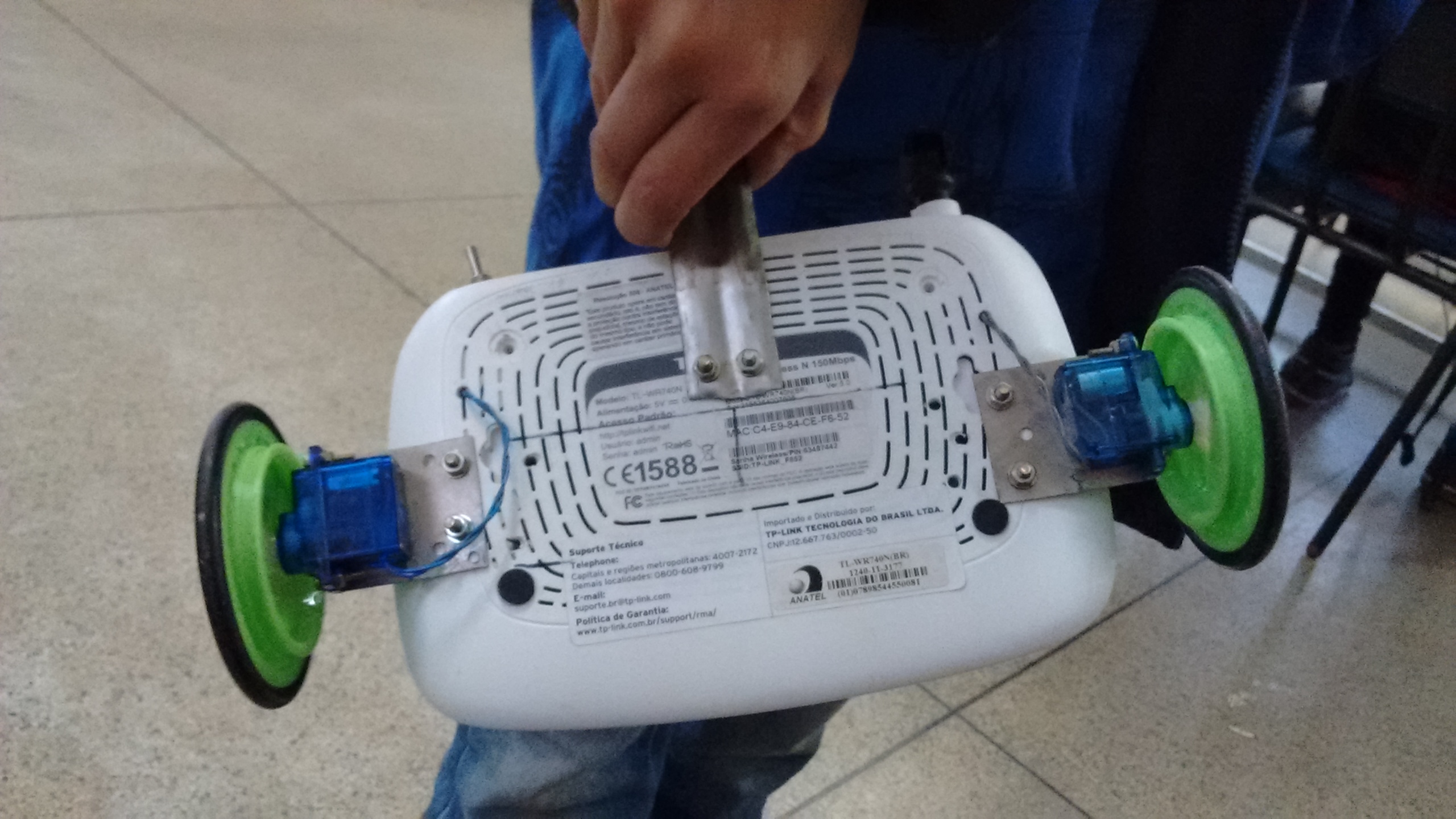
Nada me deixa mais feliz do que conseguir fazer "mais" com menos ou quase nada. Toda economia em recursos tanto de hardware quanto software traz ganhos que valem a pena serem avaliados. Eu costumo fazer exercícios de otimização em tudo que projeto, porque no final você tem um hardware mais eficiente e robusto ou um software mais rápido e que consome menos recursos. Este artigo é sobre um dos exercícios de otimização que executei. Neste artigo vou ensiná-los a construir um robô completo, usando um roteador sucateado, e que pode ser operado pelo smartphone ou qualquer dispositivo sem precisar baixar nenhum aplicativo de loja online. Continuar lendo →