Conhecendo a robótica BEAM
Certa vez estava pesquisando na internet sobre assuntos variados e acabei por acaso conhecendo a robótica B.E.A.M. Interessei-me imediatamente pelo assunto. A robótica B.E.A.M. é um conceito sobre construção de pequenos robôs que tenta copiar a estética e o comportamento de organismos naturais usando poucos componentes, geralmente analógicos, que atribuem ao robô um comportamento baseado em flutuações do caos, com resultado incrivelmente "vivo". Existem muitos tipos de BEAMs, classificados por tipos, ou por classe de comportamento. Existem muito material na internet sobre esse assunto, é só pesquisar por "BEAM robotics" ou "Robótica BEAM" para saber mais. Neste artigo vamos aprender a construir um B.E.A.M clássico que chamaremos de Robô-Escova. Ele faz parte da classe de BEAMbots chamados de Squirmers, robôs que fazem alguma coisa interessante.Sustentabilidade
Outro aspecto interessante da robótica BEAM é que devido à simplicidade dos desenhos os robôs podem ser fabricados com diversos tipos de sucata, o que confere a este tipo de trabalho um caráter sustentável, pois os praticantes da robótica BEAM têm a oportunidade de reutilizar materiais que de outra forma seriam descartados no meio ambiente.Como funciona o robô-escova?!
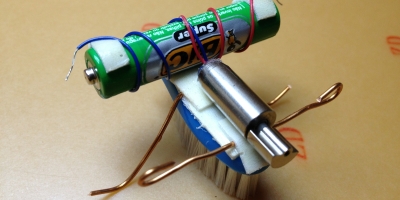
O robô-escova opera um conceito muito simples. O seu corpo é feito da cabeça de uma escova de dente. O motor do seu movimento é um vibrador de celular e a sua fonte de energia é uma pilha comum.
Cabeça da escova
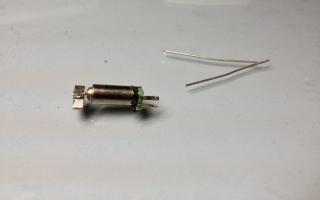
Motor de vibrador de celular
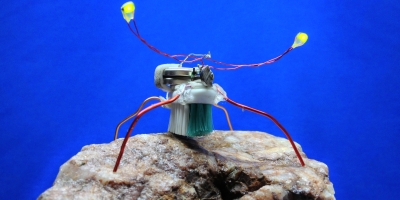
Robô escova montado, note o peso na ponta do eixo rotor.
